![]()
EV3: ubuntu環境でNXCプログラミング(インストールと設定)中・上級者向け
※ここで使用しますヘッダファイル(JissenPBL.h)およびEV3 BricxCCプログラムランチャー(run.rbf)は、 九州工業大学 花沢明俊先生が作成されたファイルを使用しております。 ファイル使用に当たり、快く了承していただき感謝いたします。 このヘッダファイルの著作権およびその他の権利は九州工業大学 花沢明俊先生にあります。 ここでは、Linux環境であるubuntuを使用してEV3プログラムの作成、コンパイル、転送、実行を行います。 環境構築に必要な手順は下記の通りです。 1.必要なファイルのダウンロードとインストールおよび環境設定 2.EV3へのリモート接続 です。 ここで使用しますLinux環境(ubuntu 16.04 LTS)のインストールと設定の説明は省略します。 1.必要なファイルのダウンロードとインストール 最初にEV3(arm)のクロスコンパイル環境をダウンロードします。ターミナルを起動後、下記のコマンドを入力します。(1行です)
wget -c http://www.codesourcery.com/sgpp/lite/arm/portal/package4571/public/arm-none-linux-gnueabi/arm-2009q1-203-arm-none-linux-gnueabi-i686-pc-linux-gnu.tar.bz2
次にインストールするディレクトリを作成して、先程ダウンロードしたファイルを展開します。今回はCodeSourceryという名前でディレクトリを作成します。
mkdir CodeSourcery tar -jxvf ~/arm-2009q1-203-arm-none-linux-gnueabi-i686-pc-linux-gnu.tar.bz2 -C ~/CodeSourcery/
PATHの設定を行います。
echo export PATH=$PATH:~/CodeSourcery/arm-2009q1/bin/ >> ~/.bashrc && . ~/.bashrc
※ ubuntuデスクトップ環境では、C言語などの開発環境などのインストール作業が別途必要です。 必要であれば、ライブラリなどのインストールを行います。
sudo apt-get install gcc-multilib
コンパイル環境の確認は
arm-none-linux-gnueabi-gcc -v
で確認ができます。 次に、BricxCC環境の構築でも使用したEV3ソースコード(lms2012)、lms_apiを作業ディレクトリに置きます。また、九州工業大学 花沢明俊先生が作成されたファイル(JissenPBL.h、EV3 BricxCCプログラムランチャー run.rbf )も同様に作業ディレクトリに置きます。
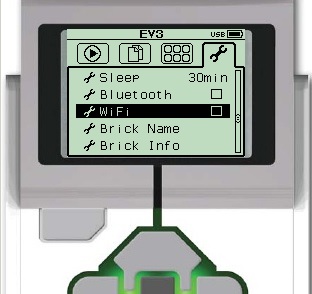
2.EV3へのリモート接続EV3へのリモート接続を行う方法は、有線LANと無線LANの2通りあります。どちらもDHCPサーバが必要となりますので、有線・無線LANルータ等が必要となります。 著者の環境では、下記の無線LAN、有線LANアダプターでの動作確認ができています(2016年8月1日現在)。 ・ ONKYO UWF-1 (無線) ・ BUFFALO LUA3-U2-ATX (有線) ・ PLANEX USB-LAN100R (有線) ・ PCI UE-100TX-G3 (有線) ※ EV3ファームウェアバージョン 1.08E LANアダプタをEV3側面のUSBポートに取り付けてルータと接続してEV3の電源を入れます。有線LANアダプタを認識すると、Brick Info の一番下にIPアドレスが表示されます(表示されない場合は、LANアダプタが未対応かIP取得ができていない可能性があります)。無線LANの場合は、EV3画面からWiFiの使用とConnectionsによる接続が必要です。
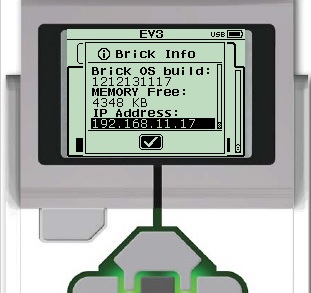
※表示されるIPアドレスは環境により異なります。 ターミナルからtelnetコマンドを使用してEV3へログインします(初期設定のEV3はtelnet接続のみ)。
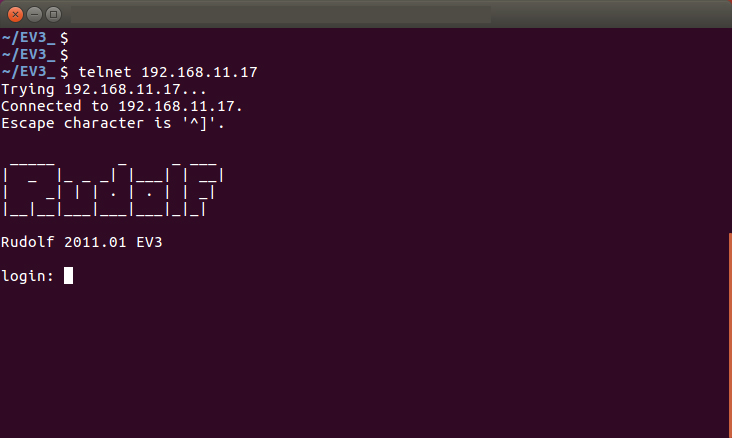
login ID はroot、パスワード無しです。 EV3へログインした後、外部PCからsshとscpコマンドが使用できるようにdropbearコマンドを実行します。
dropbear
これでEV3との接続は完了です。

