![]()
Ev3: BricxCCのインストールと設定 1中・上級者向け
注意: このページはBricxCC test releases 版を使用します。 プログラム動作に不具合などが発生する場合も考えられます。また WindowsのPATH設定も行いますので、設定・ご使用は自己責任にて十分注意願います。 必要な手順は下記の通りです。 1.必要なファイルのダウンロード 2.インストール 3.環境変数(PATH)の設定 4.EV3のファームウェアアップデート です。 1.必要なファイルのダウンロード 統合環境BricxCCとそのほかに必要なファイルをダウンロードします。 必要なファイルは下記の6つになります。 ・BricxCC通常版 (W) ・BricxCC test releases版 (W) ・linux tool (W) ・lms api (W)(M)(U) ・CodeSourcery Lite cross compiler for arm-linux(クロスコンパイラ環境) (W) ・EV3のソースコードの一部(lms2012) (W)(M)(U) ・EV3最新ファームウェア (W)(M)(U) ※ NXCを使ったEV3プログラミングは、Windows、Mac、Linux(ubuntu)環境で動作確認しています。 上記のダウンロードで必要なものを省略記号で表しています(W:Windows、M:Mac、U:ubuntu)。
< BricxCC 通常版、テストリリース版、linux tool、lms api> Bricx Command Center
< G++ クロスコンパイラ環境 for ARMプロセッサ(EV3) > CodeSourcery Lite cross compiler for arm-linux
< EV3ソースコード > GitHub EV3 sources
< EV3最新ファームウェア > www.mindstorms.com
・Bricx Command Center ここでは、BricxCCの通常版、テストリリース版、linux tool、lms apiの4つのパッケージをダウンロードします。 BricxCCの通常版は、「Downloading」の「BricxCC latest version」から最新のものをダウンロードします(著者が ダウンロードしたときはbricxcc 3.3.8.9が最新バージョンでした)。 また、その他3つのパッケージは「Downloading」の「test releases」からダウンロードします。
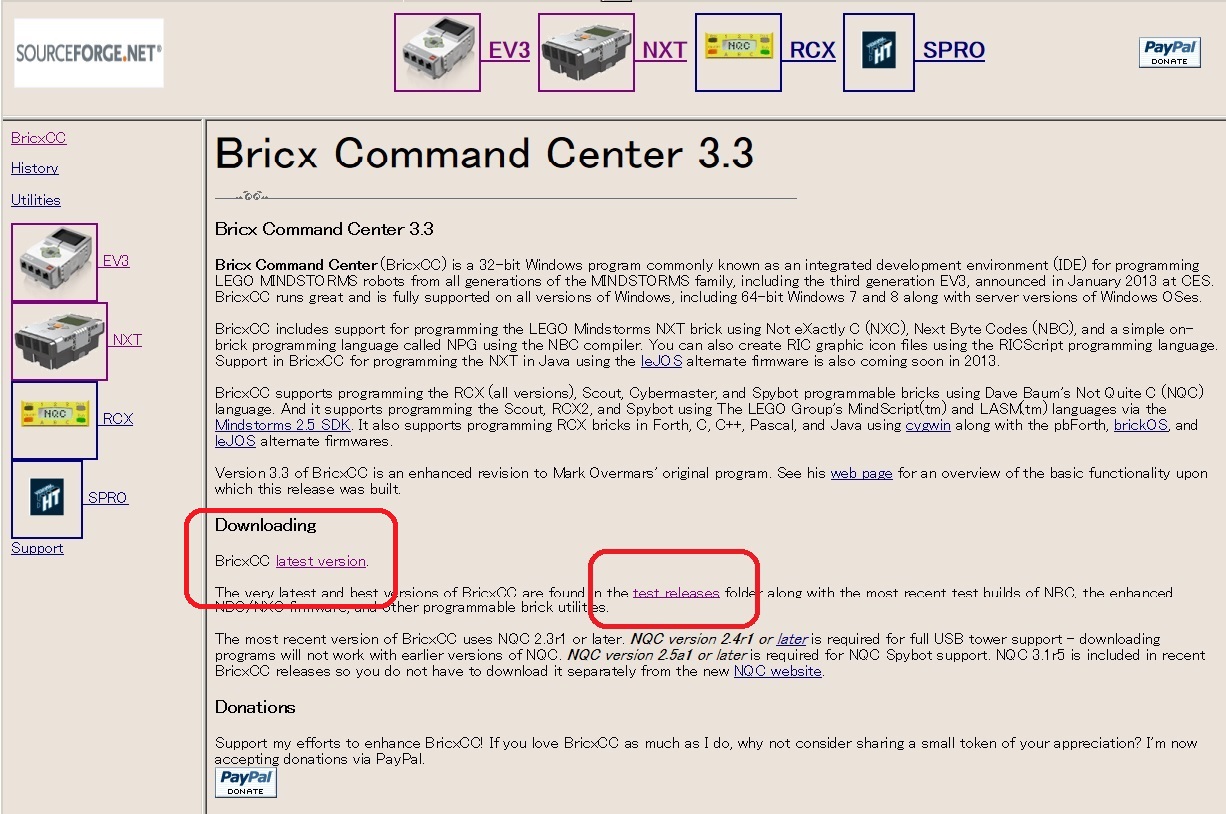
test releaseをクリックすると様々なファイルが出てきます。 詳しい内容は、readme_1st.txtに書いてあります(英語)。 「test_release2013????.zip」がBricxCCのテストリリース版になります。ファイル名の????の部分がバージョン(日付)を 示しているので最新のバージョンをダウンロードしてください。 あわせて、「linux_tools.zip」と「lms_api.zip」もダウンロードしておいてください。
・ G++ クロスコンパイラ環境 for ARMプロセッサ(EV3) 最新のMindstorms EV3 はCPUにARMプロセッサを使用しています。 クロスコンパイル環境を使用する事によってARM(EV3)用の実行ファイルを 作成することが可能となります。上記の アドレス をクリックしてCodeSourcery Liteをダウンロードします。
・EV3ソースコード(lms2012) GitHubのEV3ソースコードから一部(lms2012)をダウンロードします。 「ev3sources/lms2012/lms2012/source」内のすべてのファイルを「lms2012」というフォルダを作成して保存します。 (個別にファイルをダウンロードすると、時間と手間がかかりますのでev3sourcesすべてをダウンロードして必要な部分だけ利用しても良いと思います)
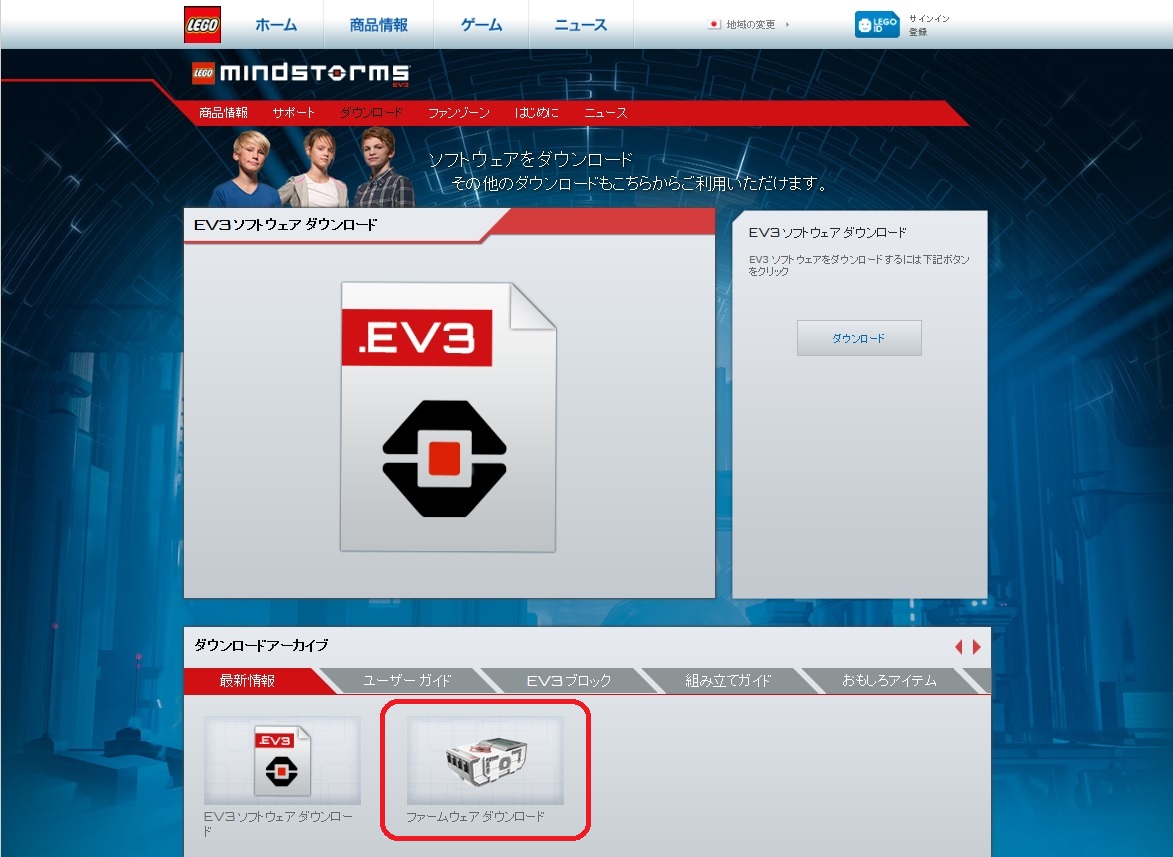
・EV3最新ファームウェア レゴ・マインドストーム(日本語)のページから最新のEV3ファームウェアをダウンロードします。 項目「ダウンロード」から「ダウンロードアーカイブ」「ファームウェアのダウンロード」を選択して 最新のファームウェアをダウンロードします。 ※ LAN経由でプログラムを転送・実行する場合は、ファームウェアが1.08である必要があります。
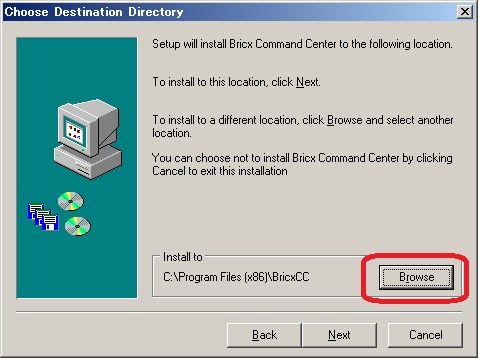
2.インストール ・BricxCC通常版のインストール テストリリース版をインストールする前に通常版をインストールします。 後からテストリリース版を上書きしてしまいますので、もし通常版をインストール済みの場合は インストールディレクトリを変更してインストールします。 ダウンロードしたファイル bricxcc_setup_XXXX.exe をダブルクリックしてBricxCCをインストールします。 インストール中にインストールフォルダを指定する下記のような画面が出ます。 ここでインストール場所をデフォルトではなく、 後でパスの通しやすいフォルダ、例えば C:\BricxCCにBrowseを押して変更します。
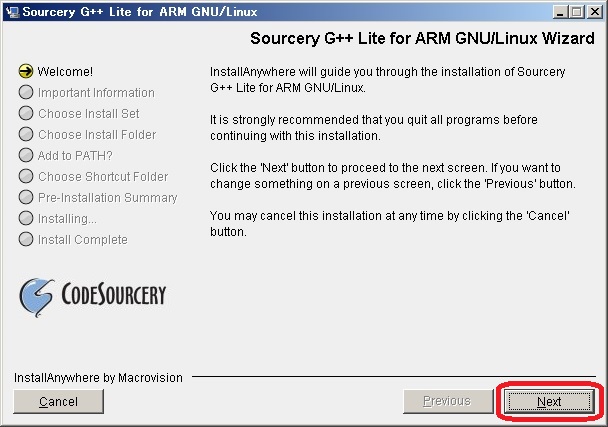
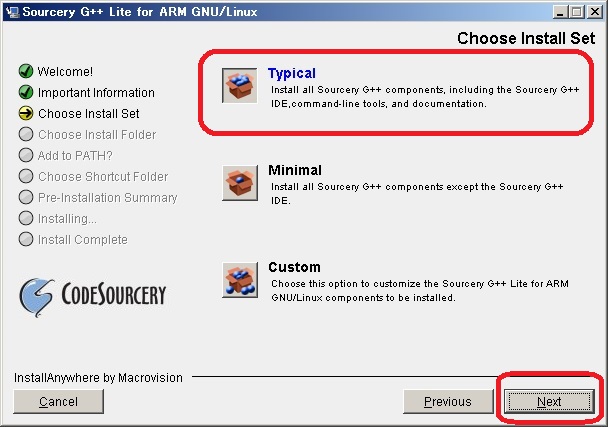
あとはNextをクリックしてBricxCCのインストールが完了します。 ・G++ クロスコンパイラ環境のインストール ダウンロードしたarm-2009q1-203-arm-none-linux-gnueabi.exe をダブルクリックしてCodeSourcery Liteのインストールを行います。 CodeSourcery Liteのインストールに関しては、特に変更点はありません。 デフォルトの設定のままインストールします。
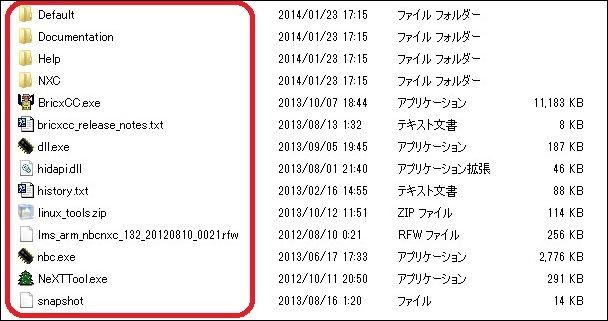
・BricxCCテストリリース版のインストール ダウンロードした test_release2013????.zip ファイルを右クリック→「すべて展開」を選択して ファイルを解凍します。解凍されたフォルダにはいくつかのファイルがありますが、これをすべて 先ほどインストールしたBricxCC通常版のフォルダ( C:\BricxCC )に上書きします。
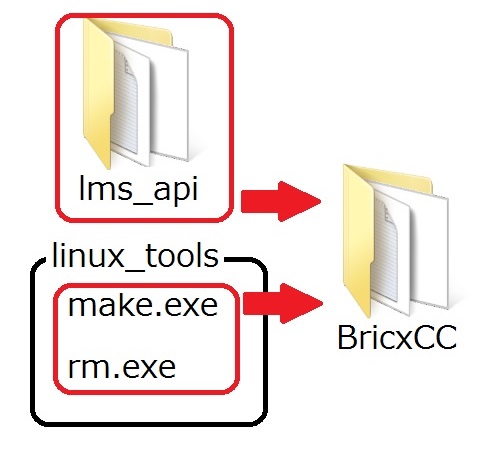
・linux_tools.zip、lms_api.zipの解凍 上記と同様にダウンロードしたlinux_tools.zip、lms_api.zipの解凍を行います。 linux_tools.zipは解凍すると「make.exe」と「rm.exe」の2つのファイルができます。 この2つのファイルをBricxCCのフォルダ(C:\BricxCC)の中に移動します。 lms_api.zipは解凍後、フォルダ(lms_api)ごとBricxCCのフォルダに移動します。
・lms2012フォルダの移動 GitHubからダウンロードしたev3sourcesの一部(lms2012フォルダ)をBricxCCフォルダの中に移動します。 場所は、「C:BricxCC\lms2012」です。
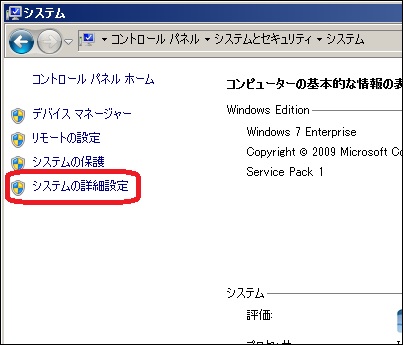
3.環境変数(PATH)の設定 先ほどインストールしたBricxCC、lms_apiフォルダにPATH(パス)の設定を行います。 「コントロールパネル」→「システムとセキュリティ」→「システム」→「システムの詳細設定」をクリックします。
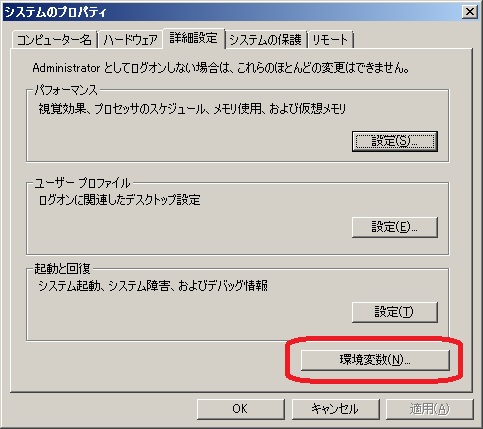
「システムのプロパティ」ウインドウの「詳細設定」タブの「環境変数(N)」をクリックします。
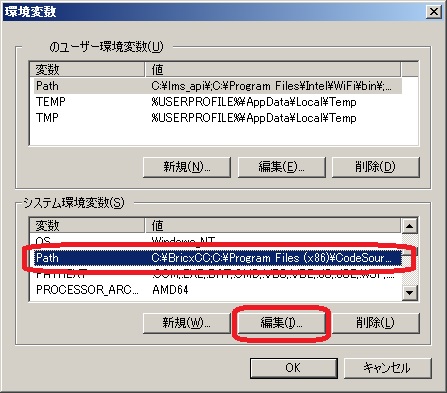
環境変数ウインドウの「システム環境変数(S)」の「Path」を選択し「編集」をクリックします。
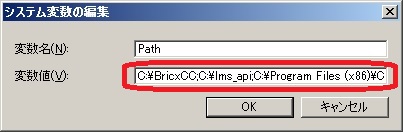
「変数値(V)」にBricxCCとlms_apiのパスを追加します。 <<注意!!>>パスの追加はシステム起動にとって重要な部分です。 自己責任にて慎重に行ってください。 変数値の最初に C:\BricxCC;C:\BricxCC\lms_api; を追記してください。
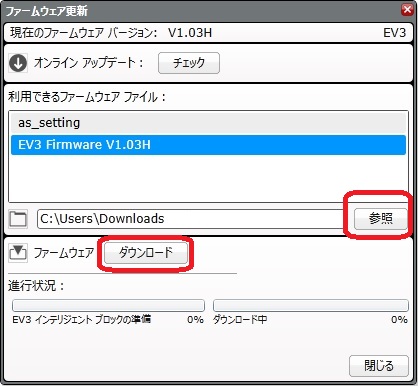
4.EV3のファームウェアアップデート <<注意!!>>ファームウェアをアップデートするときは、 フル充電の状態で行ってください。ファームウェアのアップデート中に電源が切れると 起動しなくなる恐れがあります。また、アップデート中は絶対に電源を切らないように してください。 BricxCCを使用してプログラミングを行うには、EV3のファームウェアを最新にする 必要があります。ファームウェアをアップデートする方法は、 1.LEGO社が提供するEV3ソフトウェアを使用する。 2.BricxCCを使用する。 の2通りがあります。どちらでアップデートを行ってもかまいません。 バージョンの確認方法は、EV3本体の「設定(スパナのマーク)」→「Brick Info」から 「Brick FW」で確認できます。V1.03H以降であれば動作の確認ができています(下記の注意を参照)。 <<注意!!>>BricxCC以外でLAN経由でプログラムを転送・実行する場合、 ファームウェアは1.08にしておく必要があります(2017.8.10 追記 )。 EV3ソフトウェアを使用してファームウェアをアップデートする場合は、「ツール」→「ファームウェア更新」を 選択します。「参照」から最新のファームウェアファイルを選択後、「ダウンロード」をクリックします。
BricxCCでファームウェアをアップデートする場合は、 BricxCC起動後(Port:USB、Brick Type:EV3、Firmware:Linuxを選択後OKをクリック)、 「Tools」→「Download Firmware」を選択します。その後ダウンロードしたファームウェアを 選択するとファームウェアのアップデートが始まります。
次は、ヘッダファイルの変更を行います。 ← Tips に戻る | BricxCCのインストールと設定 2 →

