![]()
EV3: モータを回転させよう中・上級者向け
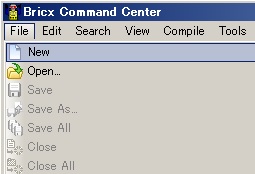
ここでは、BricxCCを使用してNXCプログラムを作成、 コンパイルとEV3への転送方法を説明します。 EV3対応のBricxCCのインストールと設定ができていない場合は こちら を参考に最初にインストールと設定を行ってください。 ・モータの回転 EV3をUSBポートに接続して電源を入れます。その後、BricxCCを起動します。 設定は、Port:USB、Brick Type:EV3、Firmware:Linuxを選択して OKをクリックします。 BricxCC起動後、ファイルを新しく作成するため「File」→「New」を選択します。
下記のサンプルプログラムを入力します。
ファイル名は「Motor.c」とします。
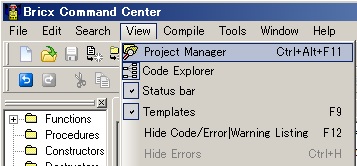
次にプロジェクトマネージャーを起動します。
「View」→「Project Manager」をクリックします。
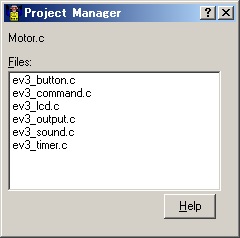
「Files」内で右クリックして「Add」を選択して C:\BricxCC\lms_api\ev3_button.c C:\BricxCC\lms_api\ev3_command.c C:\BricxCC\lms_api\ev3_lcd.c C:\BricxCC\lms_api\ev3_output.c C:\BricxCC\lms_api\ev3_sound.c C:\BricxCC\lms_api\ev3_timer.c を選択します。
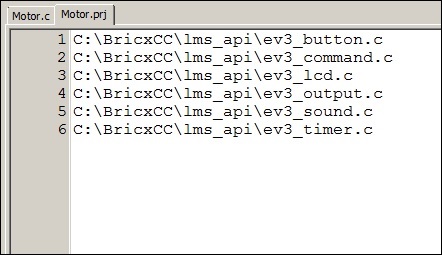
これでは完全なパスが通っていないため、「File」→「Open」から 今作成したプロジェクトファイル「Motor.prj」を開きます。 ※ファイルの種類は「All Files」にしてください。 開いたプロジェクトファイルに、パス「C:\BricxCC\lms_api\」を書き加えます。
設定は以上で終了です。 コンパイルと実行をしてみましょう。 「Compile」→「Compile and Run」を選択します。
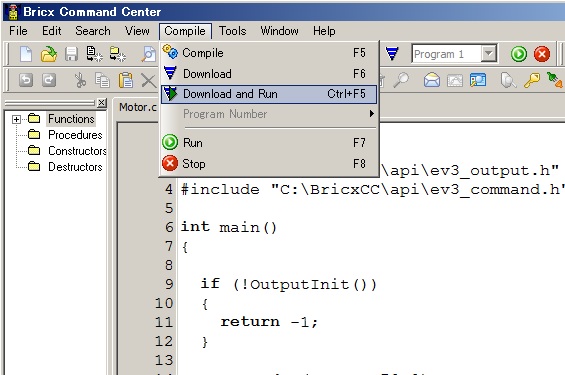
ポートAとポートBのモータは10秒回転して止まります。 ← BricxCCのインストールと設定 2 | 音をならしてみよう →

